

Introduction: TTGO T-Watch Robot




This instructables shows how to turn a TTGO T-Watch to a tiny robot.
Step 1: Preparation




TTGO T-Watch
http://www.lilygo.cn/prod_view.aspx?TypeId=50036&I...
2 Tiny Motors
e.g.: https://www.aliexpress.com/item/32953011103.html?a...
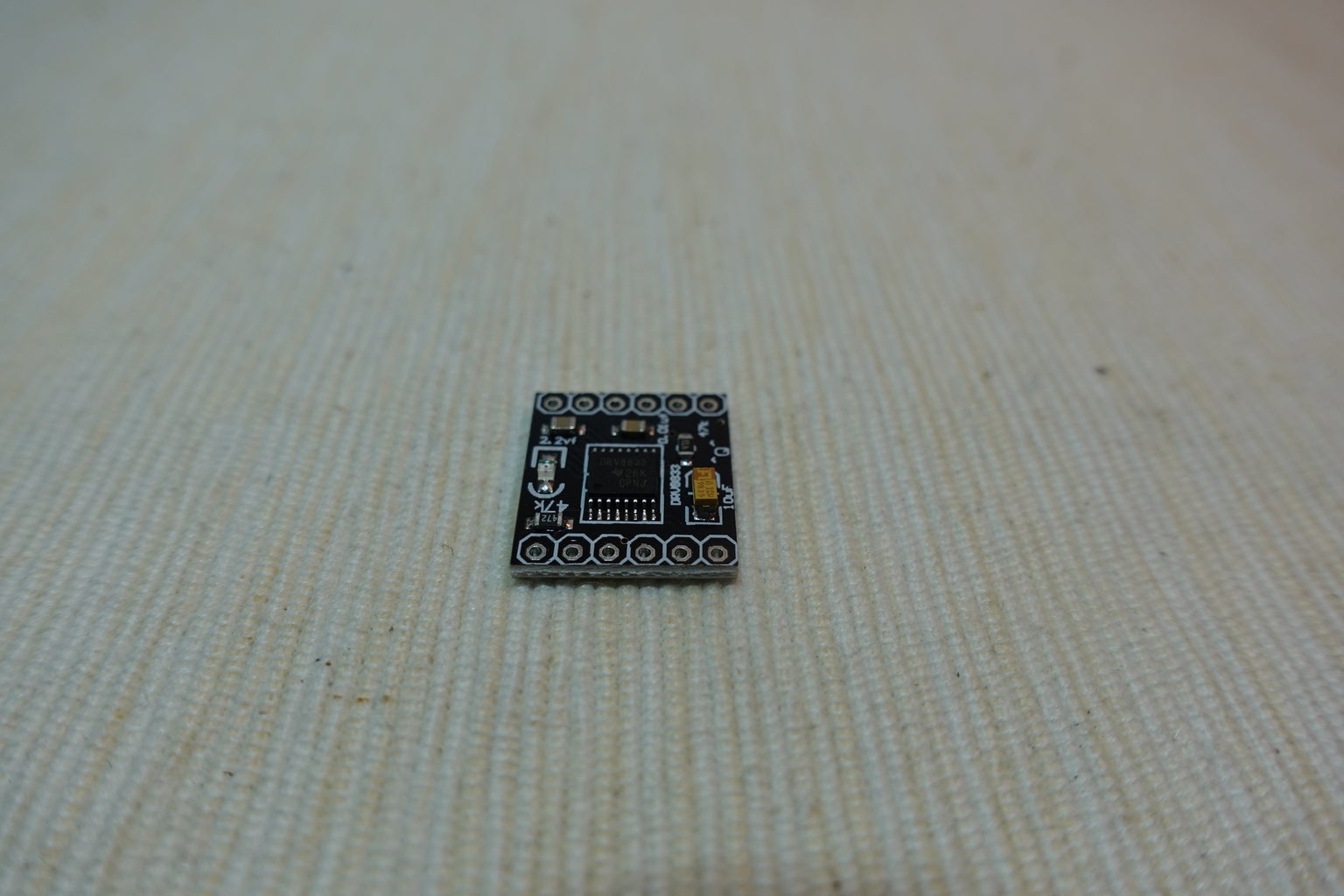
Motor Drive Board
e.g.: https://www.aliexpress.com/item/32831348515.html?a...
8 mm Nylon or Steel Ball
e.g.: https://www.aliexpress.com/item/32844271636.html?a...
7 mm Rubber Ring
e.g.: https://www.aliexpress.com/item/32970595236.html?a...
4 x 14 mm M2 Screws
Step 2: 3D Printing


Download and print the chassis at thingiverse:
Step 3: Install Rubber Rings

Install 7 mm rubber ring on the 3D printed wheels.
Step 4: Install Wheels

Install wheels to the tiny motors.
Step 5: Install Chassis


Install nylon balls and motors to the 3D printed chassis.
Step 6: Soldering Work


Here are the connection summary:
Motor Drive Board IN1 -> Motor 1 pin A IN2 -> Motor 1 pin B Vcc -> T-Watch VDD3V3 GND -> T-Watch GND IN3 -> Motor 2 pin A IN4 -> Motor 2 pin B EEP -> Vcc OUT1 -> T-Watch pin 13 OUT2 -> T-Watch pin 14 OUT3 -> T-Watch pin 25 OUT4 -> T-Watch pin 26
Note: T-Watch pin 13 and 14 require soldering on FPC socket.
Step 7: Assembly




Put the T-Watch on the chassis and screw up 14 mm M2 screws.
Step 8: Adjustment


The 8 mm nylon ball may not align with the wheel at the same level. Enlarge the chassis upper hole can adjust the level.
Step 9: Program
Download and program the sample code at GitHub:
https://github.com/moononournation/TTGO-T-Watch/tr...
Ref.:
Step 10: Enjoy!
It's time to add your custom code to your tiny robot!
Step 11: What's Next?

Soldering the pins on FPC socket is not easy. TTGO is designing a motor board for building robot, hope this can release soon.

Participated in the
Make it Move




![Tim's Mechanical Spider Leg [LU9685-20CU]](https://content.instructables.com/FFB/5R4I/LVKZ6G6R/FFB5R4ILVKZ6G6R.png?auto=webp&crop=1.2%3A1&frame=1&width=306)


